一、成果简介
1.所属领域:机器人技术
2.技术成熟度:中试
3.技术特点:
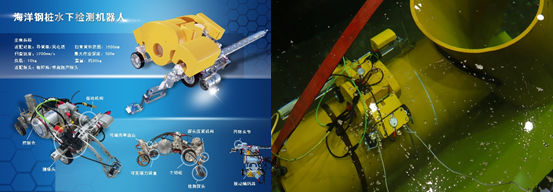
实现了导管架平台或风电塔桩水下无人检测,该成果能够在复杂流场中自适应调节吸附力大小实现可变磁力吸附,解决了机器人水下运动精度不高,稳定性差和易打滑的难题,保证了机器人行走和检测过程的稳定性,此外该成果提出了一种实现检测探头轴向、径向和回转功能的检测机构方案,解决了导管架和风电塔桩管径差异大,难以全向覆盖焊缝的难题,使机器人具备复杂TKY型节点焊缝的检测能力。试验和实际应用结果表明,该成果与传统人工检测相比,机器人检测探头可达区域范围更大、检测盲区更小、检测效率大幅度提高,并显著降低了检测成本,同时解决了人工检测带来的危险性高、检测效率低、重复性差、检测周期长及成本高等问题,可助力水下无损检测行业转型升级。
二、应用领域
海上风电塔桩、石油钻井平台、船体焊缝等。
三、对接方式
1.合作意向方联系哈工程科研院校地发展处;
2.哈工程科研院校地发展处沟通了解意向方情况;
3.会同成果完成团队与意向方共同研讨合作方案。
电话:0451-82589625
邮箱:chengguozhuanhua@hrbeu.edu.cn



